
Note: Mick Heberlein at the WisDOT Office of Surveying & Mapping provided the content for this article, including text and tables.
GPS on BM Overview
Wisconsin began collecting GPS on BM (Bench Marks) observations in June, 2020. The effort is coming to an end soon, as the deadline is Sept. 30, 2023, for observations to be collected and shared via OPUS (NGS’s Online Positioning User Service) Share.
More details can be found on the National Geodetic Survey (NGS) website.
In Wisconsin the GPS on BM campaign is being coordinated by the Wisconsin DOT (WisDOT) under the “GNSS Observation on Passive Stations Project.” Many non-DOT partners are also involved in the project.
The main benefits of involvement in the program, according to the NGS, are the following:
- Automatic generation of 2020.0 Reference Epoch Coordinates (RECs) upon release of the modernized National Spatial Reference System (NSRS), as well as eventual generation and release of Survey Epoch Coordinates (SECs).
- Local improvements to the 2022 Transformation Tool, which will enable conversions from current vertical datums to the North American-Pacific Geopotential Datum of 2022 (NAPGD2022). These will be integrated into the NGS Coordinate Conversion and Transformation Tool (NCAT).
- Update passive control status and evaluate the health of the passive control network.
- Tie local control stations to the NSRS.
- Get updated coordinates on marks for field checks of Real-Time Network (RTN) rovers to ensure consistency with NSRS coordinates.
The NGS GPS on BM progress dashboard can be found here.
The NGS OPUS Share Progress dashboard can be found here.
The WisDOT GPS on BM status map can be found here.
Wisconsin led the nation in August, 2023, shared observations!
Status of Wisconsin’s 10-km Hexagons
NGS has divided the entire nation into a series of 10-km hexagons, with the goal of getting at least one observation per hexagon. There are 1843 hexagons in Wisconsin. Hexagons are completed as a result of either an OPUS shared station observation or a station submitted to NGS via Bluebooking within the hexagon.
Table 1 shows activity since September, 2020. All remaining hexagons contain non-Wisconsin Height Modernization NGS stations, vertical-only benchmarks, or are have stations that are not GPS-able.
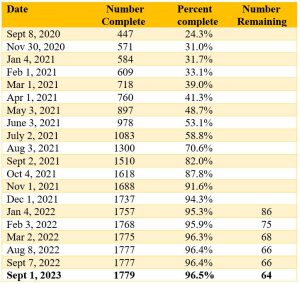
Table 1. Wisconsin 10-km hexagons completed
Wisconsin’s OPUS Solutions
Wisconsin has gone from only 65 OPUS shared observations 3 years ago to over 5400 today. Progress is shown in Table 2.
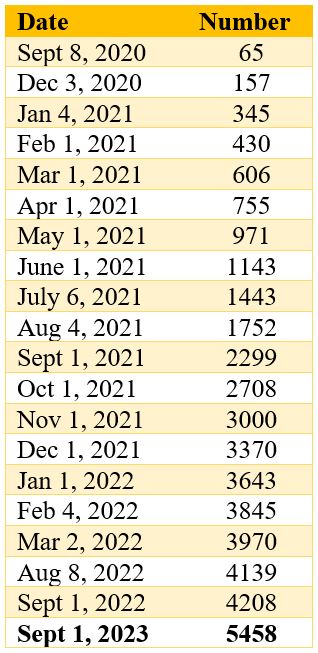
Table 2. Wisconsin OPUS shared solutions
Priority List Status
NGS has produced a prioritized list of bench marks where additional GPS data would be helpful to help define the new 2022 Geoid model. Providing GPS on stations with leveled elevations will help to relate the GPS derived ellipsoid height with the leveled elevation of these marks. The stations on the Priority List are chosen by computer generated algorithms based on station location and metadata without regard to its status as a WI-HMP station. Currently, there are about 15,000 NGS benchmarks, both WI-HMP stations and non WI-HMP, in Wisconsin. (WI-HMP is Wisconsin’s Height Modernization Program.) Most non WI-HMP stations have relatively little current survey value, but may have important older surveys tied to them.
The status of Wisconsin’s priority list is given in Table 3.
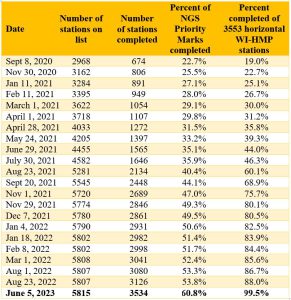
Table 3. Number of priority stations completed
Notes: There are not many horizontal WI-HMP stations remaining that do not have a GPS on BM observation; Not all WI-HMP stations are currently on the Priority List; The vast majority of observations are on WI-HMP horizontal stations, but not all; NGS adds additional stations to the Priority List after certain stations are observed; in an effort to make sure GPS on BM observations are spread out throughout a region, NGS designates only one ‘completed’ station in every NGS 2 Km hexagon, no matter how many stations are in the hexagon.
HARN Stations
One goal of the WisDOT’s GNSS Observation on Passive Stations Project is to get two observations on all original HARN stations or their replacements in Wisconsin. There are 80 stations in total. The original HARN stations are a higher accuracy station and provided the initial control from which all other horizontal stations in Wisconsin were surveyed from. (Table 4)
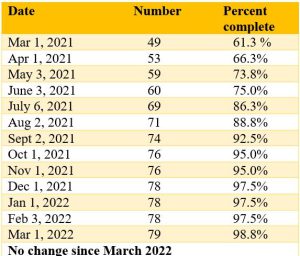
Table 4. HARN stations completed
Note: The remaining station in Milwaukee county has been destroyed.
2023 Reobservations
In April, 2023, WisDOT created a list of stations where to obtain an additional GPS on BM observation, based on the following criteria: 1) Horizontal Wisconsin Height Modernization Program (WI-HMP) stations with no GPS on BM observations or were part not of an NGS bluebooked project since 2013; 2) Single observations of horizontal stations where the difference between the OPUS Share results and the published data was outside of our tolerances; 3) A station with multiple GPS on BM observations where the horizontal difference between observations was outside of our tolerances regardless of how it compares to the published coordinates.
It was determined that 498 stations needed reobservation. A completed reobservation is a Shared OPUS observation where the results of multiple observations of a station match each other or a single observation matches NGS published values. As of Sept. 1, 2023, 373 reobservations have been completed (74.9%).
More Information
The list of non-WisDOT partners (that WisDOT is aware of) that have or are planning to submit OPUS Share observations includes: J.W. Austin Associates of Minocqua, Vernon County, LaCrosse County, Dodge County, Dunn County, Brown County, Sheboygan County, Washington County, Burnett County, Manitowoc County, Jackson County, Clark County, Sawyer County, Fond du Lac County, Oneida County, Washburn County, Lincoln County, Rock County, Oconto County, City of Madison, Landtech Surveying of Oconomowoc, Seiler Instruments, Leica Geosystems, Milwaukee Metropolitan Sewerage District, DJ Henkel and Associates LLC, Northeast Wisconsin Technical College, Ayres and Associates, and Christopher J. Gregory PLS.
For more information you can contact Mick Heberlein at the WisDOT or Jacob Heck with NGS.